سیستم های کنترلی را میتوان از نظر عملکرد به چند دسته ی کنترل غیر فعال ، کنترل نیمه فعال ، کنترل فعال و کنترل هیبریدی تقسیم نمود .
الف: سیستم های کنترل غیر فعال
این نوع سیستم ها از پاسخ ایجاد شده در سازه در اثر یک تحریک خارجی همچون زلزله استفاده کرده و اتلاف انرژی میکنند. به عنوان مثال سرعت میان طبقه ای در میراگر های ویسکوز و یا جا به جایی نسبی در میراگر های اصطکاکی از جمله ی این موارد میباشد. در این نوع سیستم ها عملکرد به میزان قابل ملاحظه ای به فرکانس بارگذاری و دامنه حرکت وابسته است.
سیستم های کنترل غیر فعال نیز به دو دسته ی جداساز لرزه و میراگر تقسیم میشوند که میتوانند تلفیقی از هر دو حالت نیز باشند.
همچنین میراگر ها نیز میتوانند میراگر وابسته به سرعت و یا میراگر وابسته به جابجایی باشند. میراگر های وابسته به سرعت همچون میراگر ویسکوز میباشند که به لحاظ نظری باعث افزایش سختی سیستم سازه ای نشده و تنها با افزایش میرایی باعث کاهش پاسخ دینامیکی سازه میشوند.
اما میراگر های وابسته به جابجایی مثل میراگر اصطکاکی یا میراگر تسلیم شونده ، باعث افزوده شدن سختی سازه نیز میشوند . در سازه های سخت و کم ارتفاع که قاعدتا جابجایی سازه مقدار زیادی نیست ، استفاده از میراگر های وابسته به جابجایی چندان مطلوب به نظر نمیرسد. در سازه های کوتاه و سخت ، استفاده از جداساز ها مناسب تر است.
استفاده از جداسازه های لرزه ای باعث افزایش میرایی در پایه سازه شده و به همین منظور انرژی ورودی به سازه را کاهش میدهد. در این شرایط دوره تناوب کل سیستم افزایش میابد و بیشتر جابجایی سازه در جداساز پایه سازه اتفاق می افتد .
از جمله میراگر های کنترل غیر فعال میتوان به میراگر فلزی تسلیمی ، میراگر ویسکو الاستیک ، میراگر اصطکاکی ، میراگر ویسکوز ، میراگر جرمی تنظیم شده (TMD) و میراگر سیال تنظیم شده (TLD) اشاره نمود.
ب: سیستم های کنترل فعال
در سال های اخیر با پیشرفت علم دیجیتال و ساخت سنسور ، سیستم های کنترل فعال در سازه ها مورد استفاده قرار گرفت . در این حالت پاسخ سازه در مقابل بار باد یا زلزله به وسیله یک منبع انرژی خارجی کاهش داده میشود . در واقع سیستم های کنترل فعال مثل ربات عمل میکنند و امکان تغییر پارامترهای دینامیکی سازه را به طرق مختلف دارند.
این سیستم ها پیچیدگی بیشتری نسبت به سایر سیستم ها دارند و تکنولوژی ها و امکانات زیادی برای آن لازم است. در سال های اخیر از سیستم های کنترل فعال در کشور های آمریکا و ژاپن در برخی سازه ها مورد استفاده قرار گرفته است .
در این نوع از سیستم کنترلی ، یک سری سنسور در مکان های مختلف سازه قرار دارند که همه ی آنها به یک پردازنده مرکزی اتصال دارند . این پردازنده مرکزی (CPU) در حال تحلیل داده های دریافت شده از سنسور ها میباشد .در این پردازنده مرکزی پس از دریافت اطلاعات از سنسور ها و تحلیل آنها بر اساس الگوریتم های بهینه سازی تعریف شده ای ، فرمان به ابزار کنترلی فعال صادر میشود.این ابزار پس از دریافت فرمان ، نیروی معین شده را به سازه اعمال میکنند با این هدف که ارتعاش سازه را کاهش دهند. واقعیت این است که به دلیل تاخیر زمانی در اعمال نیرو از جانب سیستم کنترلی فعال ، رسیدن به این هدف به طور کامل و ایده آل امکان پذیر نمیباشد.
میراگر های جرمی تنظیم شونده فعال (ATMD) از جمله سیستم های کنترل فعال میباشند.
پ: سیستم های کنترل نیمه فعال
این سیستم همچون سیستم کنترل فعال دارای ابزار کنترلی است و تقریبا مثل سیستم کنترل فعال عمل میکند ، با این تفاوت که نسبت به سیستم کنترل فعال به انرژی کمتری نیاز دارد. در این سیستم نیز یک کنترل کننده داده ها را پرداش میکند و سیگنال فرمان مناسب با آن را به ابزار کنترلی میدهد. اگر چه در این سیستم مثل سیستم های کنترل غیر فعال میتواند به تنهایی در اثر حرکات سازه عملکرد داشته باشد ، اما از طریق تنظیم مناسب سیستم کنترلی نیمه فعال بر اساس یک الگوریتم تعریف شده ، این سیستم میتواند نقش موثر تری را نسبت به سیستم کنترل غیر فعال ایفا کند .
این سیستم عملکرد ساده تر از سیستم کنترل فعال داشته و از نظر اقتصادی هم به صرفه تر است. با توجه به این موضوع که سیستم کنترل نیمه فعال ساده تر از سیستم کنترل فعال است ، قاعدتا از نظر عملکرد هم کارایی کمتری را داراست.
ت:سیستم های کنترل مختلط یا هیبریدی
این سیستم ترکیبی از سیستم کنترل فعال و کنترل غیر فعال است به طوری که مجموعه ای از مزایای هر دو سیستم را دارا میباشد. در این نوع سیستم کنترل کننده های غیر فعال بخش عمده عملیات کاهش پاسخ سازه را بر عهده دارند و در کنار آن سیستم کنترل فعال یا نیمه فعال هم عمل میکند.
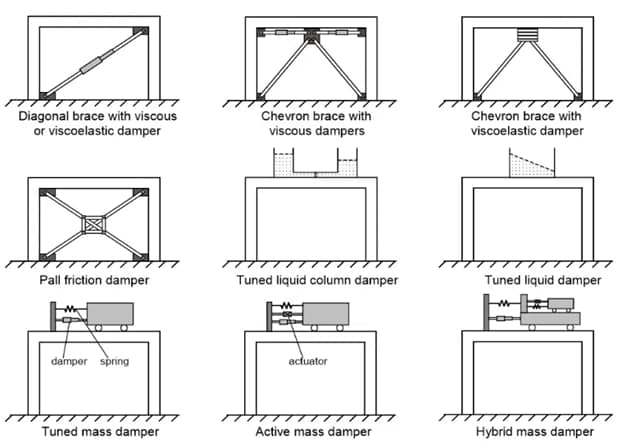
نمونه های مختلفی از سیستم های کنترلی